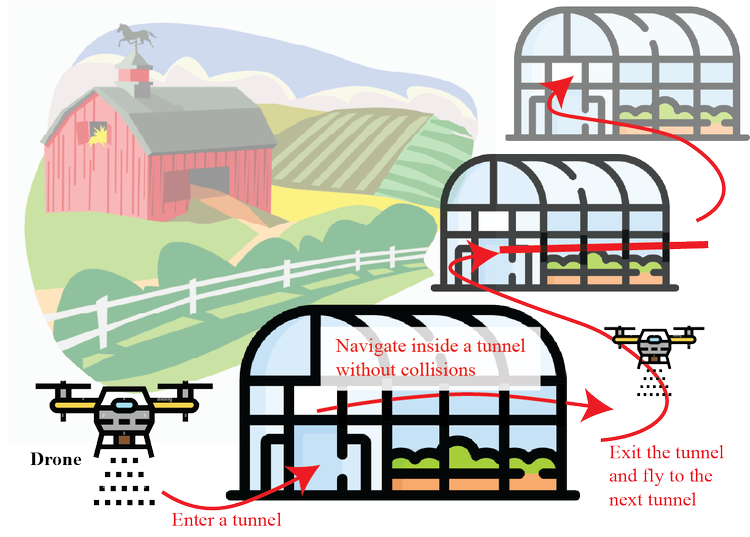
We introduce AgriNav-Sim2Real, a large-scale dataset for greenhouse navigation that bridges synthetic (Unreal Engine + AirSim) and real (handheld/UGV/drone) captures.
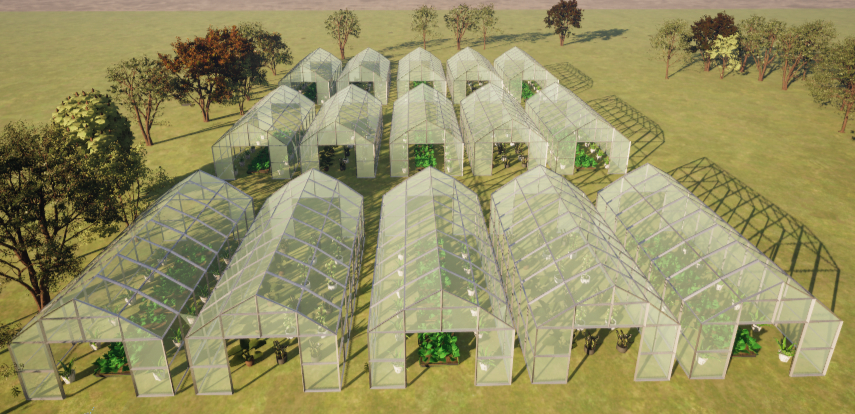
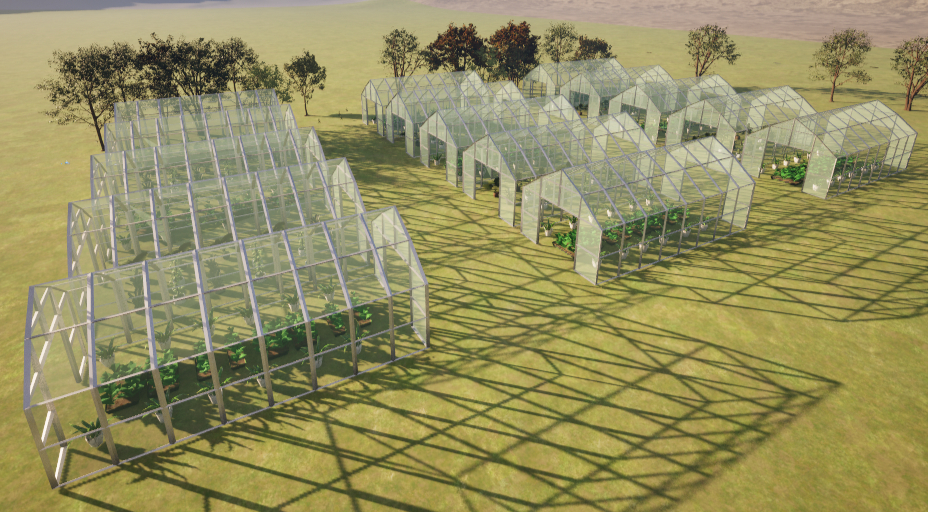
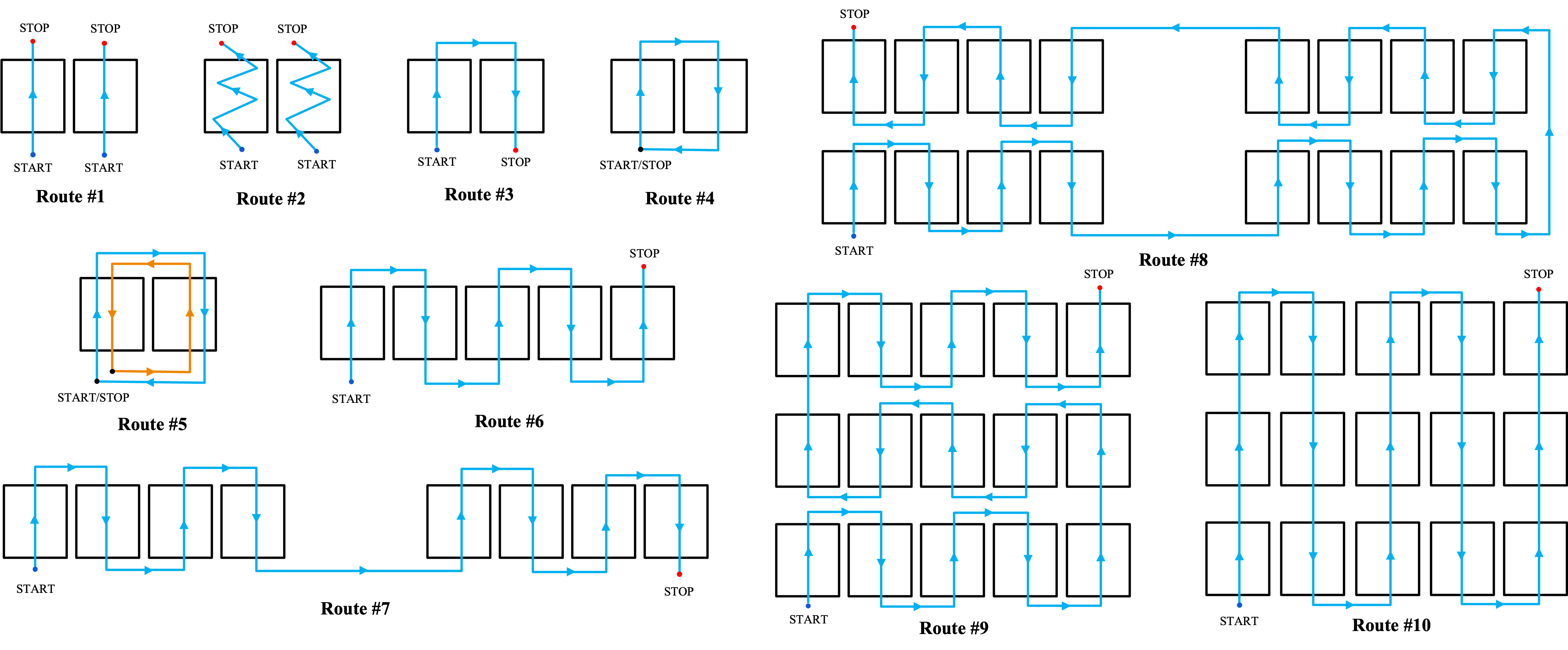
The synthetic split provides RGB, Depth, Semantic Segmentation, LiDAR, IMU, and GPS/pose data in a 3×5 connected-greenhouse with 10 canonical routes (loop, straight, zig-zag, in/out), rendered at a resolution of 960×540 px.
The real split offers ZED2i RGB-D, Alvium NIR, and IMU recordings across multiple farm sessions, with optional Insta360 360° context, captured at 3840×2160 px resolution.
In total, the dataset contains 847,243 files (15 videos, 674.3 GB), organized with timestamp-based filenames shared across modalities for straightforward synchronization and consistent folder layout for loaders and baselines.
We also establish a benchmark suite evaluating recent methods in object detection and semantic segmentation (e.g., YOLOv8, Mask R-CNN, SegFormer) to assess sim-to-real generalization across multi-sensor inputs (RGB, Depth, NIR).
AgriNav-Sim2Real targets tasks in navigation and obstacle avoidance, depth estimation, semantic segmentation, cross-modal fusion (RGB-D/NIR), and sim-to-real transfer (train synthetic → evaluate real).
Dataset Highlights
Synthetic Dataset Highlight✨
Modalities: RGB, Depth (PFM), Semantic Segmentation (uint8 masks), LiDAR (ASCII), IMU, GPS/pose.
Environment: 3×5 connected greenhouses with dynamic lighting, wind, clutter, and 10 route classes
(Route #1–#10) rendered via Unreal Engine + AirSim.
Organization: Per-route folder structure with timestamp-based filenames shared across modalities;
optional scenes/ (for domain randomization) and routes/ (for waypoints).
Use Cases: Synthetic data pretraining, sensor fusion benchmarking, 3D reconstruction,
and sim-to-real transfer learning.
Real Dataset Highlight✨
Modalities: ZED2i RGB-D + IMU; Alvium 1800 U-501 NIR; (FLIR Lepton LWIR capable but not in this release);
Insta360 X3 for 360° context.
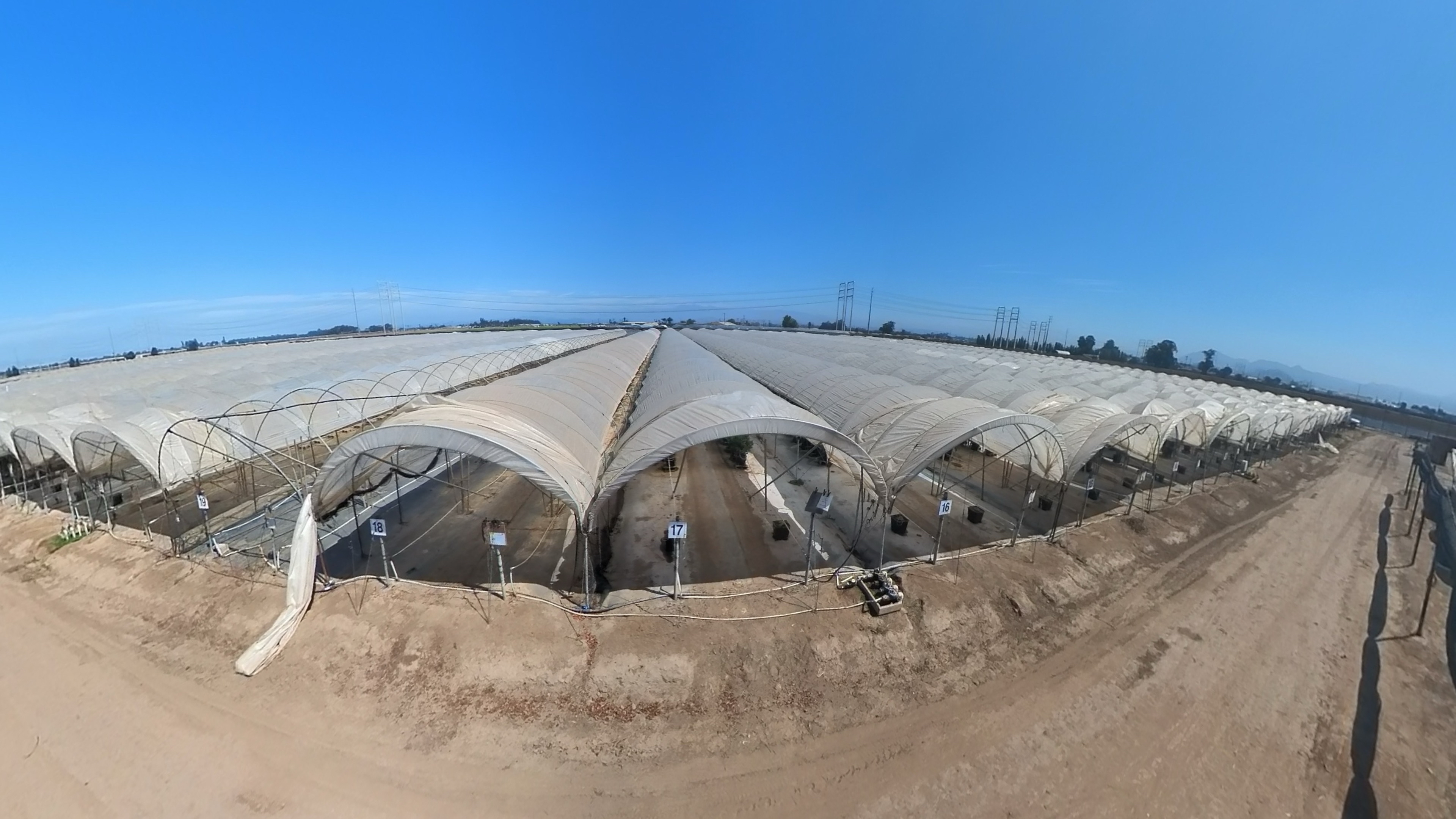
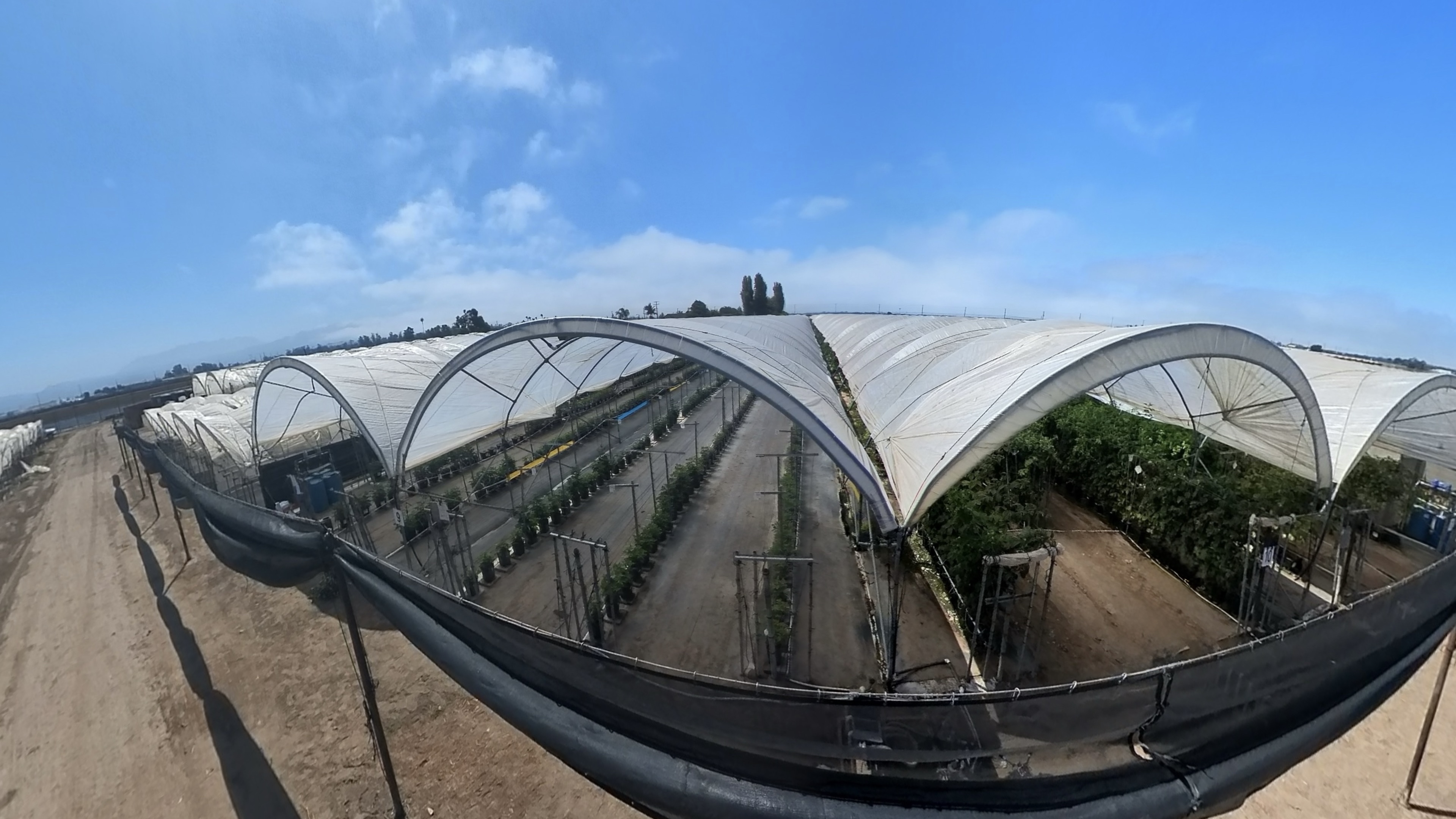
Environment: Field recordings from commercial greenhouses and open-farm setups under varying lighting,
weather, and plant species (strawberries, blueberries, blackberries).
Organization: Per-session folders organized by timestamp and sensor type (e.g., nir/, imu/),
synchronized for multimodal processing.
Use Cases: Real-world validation of trained navigation policies, depth estimation, and
cross-modal RGB↔NIR domain adaptation.